Prioritization and static error compensation for multi-camera collaborative tracking in augmented reality

Note: We don't have the ability to review paper
PubDate: April 2017
Teams: Shanghai Jiao Tong Univ;Johns Hopkins University
Writers: Jianren Wang; Long Qian; Ehsan Azimi; Peter Kazanzides
Abstract
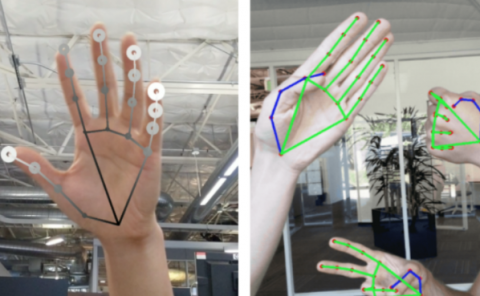
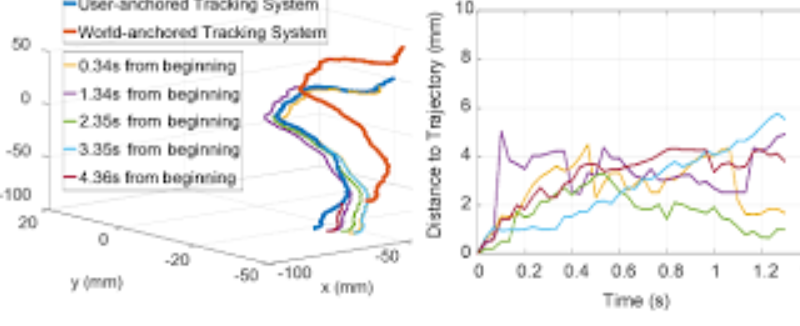
An effective and simple method is proposed for multi-camera collaborative tracking, based on the prioritization of all tracking units, and then modeling the discrepancy between different tracking units as a locally static transformation error. Static error compensation is applied to the lower-priority tracking systems when high-priority trackers are not available. The method does not require high-end or carefully calibrated tracking units, and is able to effectively provide a comfortable augmented reality experience for users. A pilot study demonstrates the validity of the proposed method.