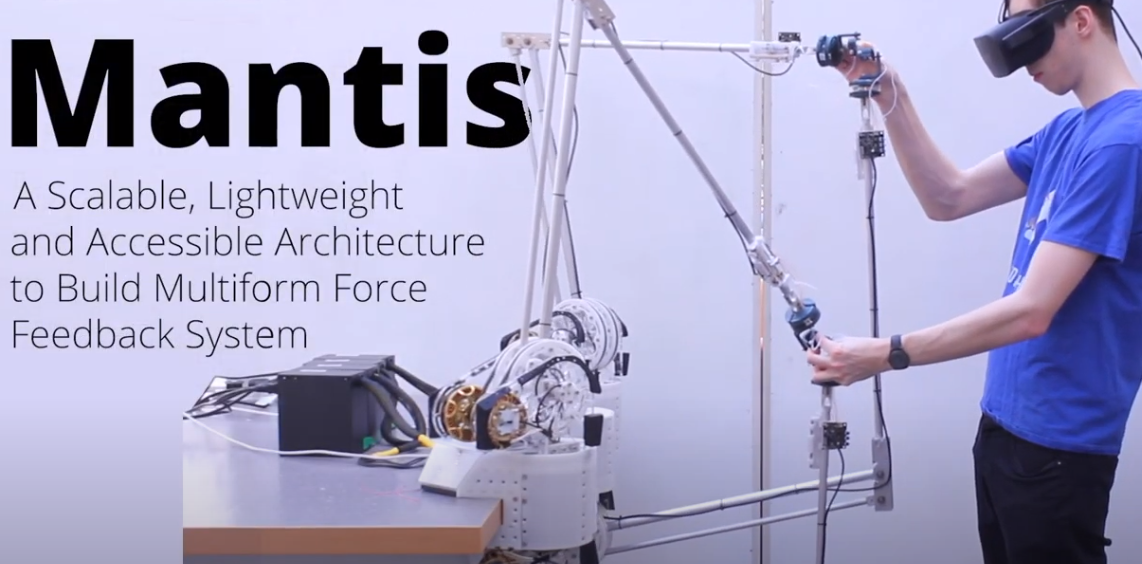
Mantis: A Scalable, Lightweight and AccessibleArchitecture to Build Multiform Force Feedback Systems

PubDate: October 2019
Teams: University of Bristol
Writers: Gareth Barnaby, Anne Roudaut
PDF: Mantis: A Scalable, Lightweight and AccessibleArchitecture to Build Multiform Force Feedback Systems
Project: Mantis: A Scalable, Lightweight and AccessibleArchitecture to Build Multiform Force Feedback Systems
Abstract
Mantis is a highly scalable system architecture that democratizes haptic devices by enabling designers to create accurate, multiform and accessible force feedback systems. Mantis uses brushless DC motors, custom electronic controllers, and an admittance control scheme to achieve stable high-quality haptic rendering. It enables common desktop form factors but also: large workspaces (multiple arm lengths), multiple arm workspaces, and mobile workspaces. It also uses accessible components and costs significantly less than typical high-fidelity force feedback solutions which are often confined to research labs. We present our design and show that Mantis can reproduce the haptic fidelity of common robotic arms. We demonstrate its multiform ability by implementing five systems: a single desktop-sized device, a single large workspace device, a large workspace system with four points of feedback, a mobile system and a wearable one.