Learning Progressive Point Embeddings for 3D Point Cloud Generation

PubDate: June 2021
Teams: The University of Sydney
Writers: Cheng Wen Baosheng Yu Dacheng Tao
PDF: Learning Progressive Point Embeddings for 3D Point Cloud Generation
Abstract
Generative models for 3D point clouds are extremely important for scene/object reconstruction applications in autonomous driving and robotics. Despite recent success of deep learning-based representation learning, it remains a great challenge for deep neural networks to synthesize or
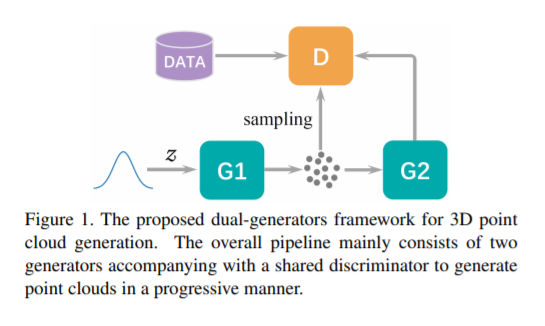
reconstruct high-fidelity point clouds, because of the difficulties in 1) learning effective pointwise representations; and 2) generating realistic point clouds from complex distributions. In this paper, we devise a dual-generators framework for point cloud generation, which generalizes vanilla generative adversarial learning framework in a progressive manner. Specifically, the first generator aims to learn effective point embeddings in a breadth-first manner, while the second generator is used to refine the generated point cloud based on a depth-first point embedding to generate a robust and uniform point cloud. The proposed dual-generators framework thus is able to progressively learn effective point embeddings for accurate point cloud generation. Experimental results on a variety of object categories from the most popular point cloud generation dataset, ShapeNet, demonstrate the state-of-the-art performance of the proposed method for accurate point cloud generation.