Enabling Situational Awareness via Augmented Reality of Autonomous Robot-Based Environmental Change Detection

PubDate: July 2020
Teams: US Army,University of California
Writers: Christopher ReardonEmail authorJason GregoryCarlos Nieto-GrandaJohn G. Rogers

Abstract
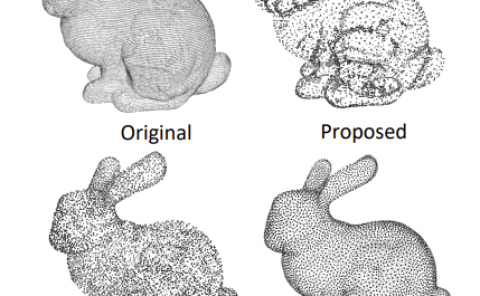
Accurately detecting changes in one’s environment is an important ability for many application domains, but can be challenging for humans. Autonomous robots can easily be made to autonomously detect metric changes in the environment, but unlike humans, understanding context can be challenging for robots. We present a novel system that uses an autonomous robot performing point cloud-based change detection to facilitate information-gathering tasks and provides enhanced situational awareness. The robotic system communicates detected changes via augmented reality to a human teammate for evaluation. We present results from a fielded system using two differently-equipped robots to examine implementation questions of point cloud density and its effect on visualization of changes. Our results show that there are trade-offs between implementations that we believe will be constructive towards similar systems in the future.