Torque Contribution to Haptic Rendering of Virtual Textures

PubDate: March 2017
Teams: University of California at Los Angeles;Carnegie Mellon Universit;University of Hawaii at Manoa
Writers: Sahba Aghajani Pedram; Roberta L. Klatzky; Peter Berkelman
PDF: Torque Contribution to Haptic Rendering of Virtual Textures
Abstract
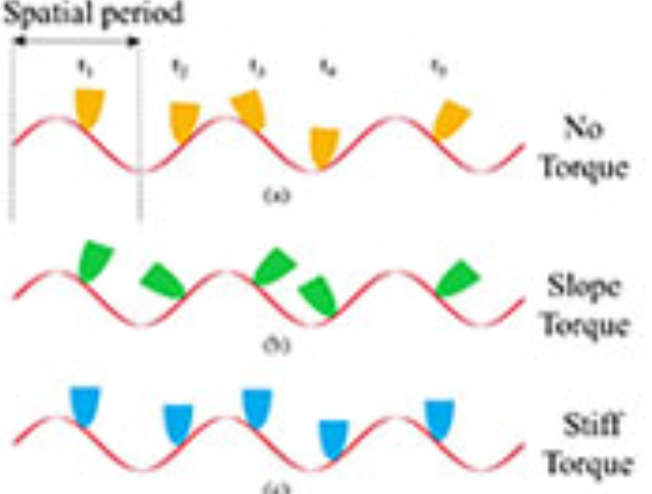
Despite the fact that conventional haptic interfaces and rendering algorithms commonly approximate interactions with force only, the dynamic effects of even simple tasks, e.g., writing on a paper, involve both forces and torques. To extend previous algorithms as well as to investigate the effects of torque feedback on human roughness perception, we deployed a novel haptic platform with two probes, fingertip and penhandle. Three torque conditions were examined: 1) Slope Torque, which orients the probe perpendicular to the surface, 2) No Torque, where no active torque is provided by the device, and 3) Stiff Torque, where torque feedback is provided to keep the probe upright. A conventional magnitude estimation experiment was performed. The results indicated that both the torque signals and grasp type mediate human perception of virtual textures. Slope Torque led to greater perceived roughness when the fingertip was used, and the fingertip led to higher roughness ratings than the penhandle with the Slope Torque condition. The Slope Torque algorithm appears to be advantageous for generating rougher surfaces compared to the force-based algorithms which are typically limited by the system stability and actuator saturation.